Punto 1 — Exploración del entorno y sensores (QCar real)
1) Resumen ejecutivo
En este Punto 1 se realizó una instrumentación inicial del ecosistema QCar enfocada netamente en la plataforma física (QCar con scripts de adquisición). El objetivo fue confirmar que la cadena de datos de sensores funciona de extremo a extremo y que puede dejar trazabilidad útil para fases posteriores. Se cubrieron cuatro familias de sensores: Cámaras (visión 360 / RGB-D), LiDAR, IMU y encoders. También se dejaron lineamientos de guardado para construir datasets comparables entre corridas. Como resultado tangible, este avance entrega estructura de logs, recomendaciones de visualización base y criterios mínimos de validación para que el equipo replique pruebas en hardware real de forma estructurada.
2) Contexto y objetivo
El desarrollo exige resolver tareas complejas de percepción y control (como conducción autónoma o teleoperación). Este Punto 1 establece la base técnica física: verificar que el hardware entrega datos, validar el formato, la sincronización temporal, la coherencia de unidades y establecer sanity checks.
Para la exploración de hardware real y adquisición rápida se utiliza Python, asegurando que los scripts se comuniquen correctamente con las APIs del vehículo.
3) Alcance y entregables
Alcance
- Explorar adquisición en el QCar real con logging reproducible.
- Integrar y visualizar la lectura de cámaras 360 y escáner LiDAR.
- Definir estructura mínima de datasets y convenciones de nombres.
- Identificar problemas típicos de integración de hardware y mitigaciones.
Entregables del Punto 1
- Scripts/cuadernos de adquisición y visualización en Python.
- Logs/datasets de prueba en formato tabular y/o binario.
- Capturas del setup físico y streams de sensores (Cámaras y LiDAR).
- Plots básicos de IMU para validación rápida.
Definition of Done (DoD)
Se considera completado el Punto 1 cuando:
- Se demuestra captura de al menos una corrida física completa.
- Existen timestamps y metadatos suficientes para reconstruir la secuencia.
- Hay evidencia visual (capturas/plots) por sensor crítico integrado.
- Se documentan incidencias de hardware/software y su solución aplicada o pendiente.
4) Setup Físico (QCar)
Checklist de prerequisitos
- Energía (baterías cargadas) y estado físico del vehículo verificados.
- Conectividad local (Wi-Fi/red del laboratorio) operativa para acceder a la computadora a bordo.
- Zona segura de prueba, sin obstáculos no controlados.
- Usuario con permisos para ejecutar scripts, crear carpetas y escribir logs en el sistema del QCar.
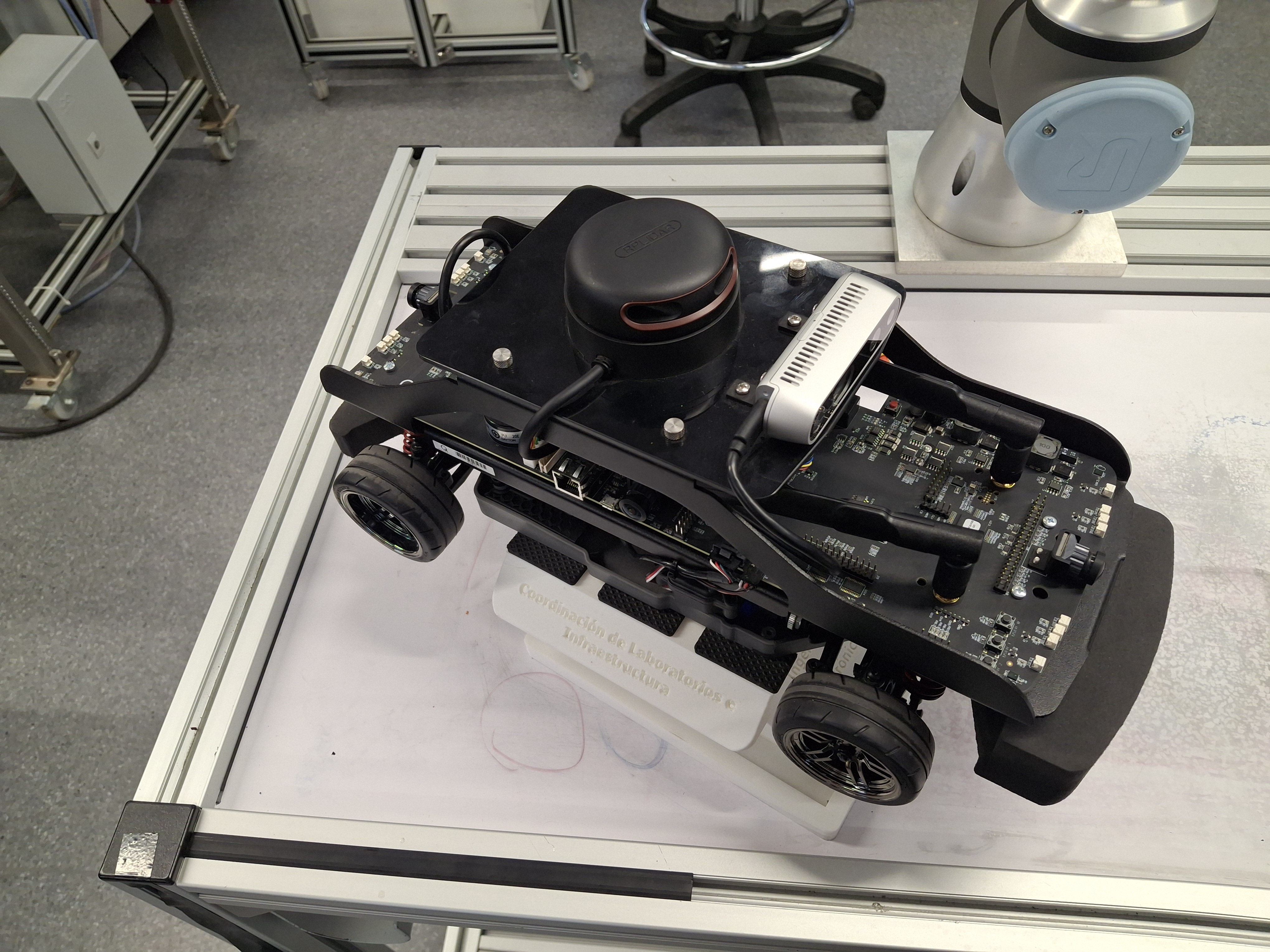 Vista del hardware del QCar instrumentado sobre la mesa de trabajo, mostrando el LiDAR superior, cámaras y la electrónica expuesta.
Vista del hardware del QCar instrumentado sobre la mesa de trabajo, mostrando el LiDAR superior, cámaras y la electrónica expuesta.
Notas de entorno Python
- Definir un entorno virtual dedicado (
venvo conda) en la placa de desarrollo del QCar. - Instalar dependencias de captura y visualización (ej. librerías de Quanser HAL/PAL, OpenCV).
- Si se utilizan cámaras de profundidad y aparece
ModuleNotFoundError: pyrealsense2, evaluar la instalación explícita del paquete compatible con el SO/arquitectura ARM del vehículo.
5) Sensores y datos
| Sensor | Qué mide | Unidad típica | Qué se guardó | Uso inmediato (plot/preview) | Riesgos |
|---|---|---|---|---|---|
| Cámaras (360 / RGB) | Imágenes del entorno alrededor del vehículo | color (8-bit) | Frames RGB concatenados, timestamp | Preview en vivo de Combined View | Desalineación de cámaras, baja exposición, lag de transmisión |
| LiDAR | Distancia angular del entorno 2D | m (rango), rad/deg (ángulo) | Scan crudo por barrido + timestamp | Mapa 2D de puntos / Polar plot | Valores 0/inf, reflexión en ventanas/metales, ruido |
| IMU | Aceleración y velocidad angular | m/s², rad/s (o deg/s) | Series temporales + timestamp | Plot ax/ay/az, gx/gy/gz | Drift, ejes mal interpretados, offset de calibración |
| Encoders | Rotación de ruedas para odometría | ticks, rad, m/s, m | ticks/contador y tiempo | Velocidad estimada y distancia | Conversión con factor incorrecto, signo invertido |
6) Flujo de trabajo — Adquisición (Python)
6.1 Objetivo
Confirmar adquisición de sensores sobre el hardware real, visualizar los datos en tiempo real para depuración y producir logs limpios.
6.2 Procedimiento (paso a paso)
A) Visión (Cámaras 360 / RGB)
- Inicializar el stream de las múltiples cámaras del QCar.
- Ensamblar los frames en una vista combinada (Combined View) para tener perspectiva total.
- Verificar la tasa de refresco (FPS) y la correcta iluminación del entorno.
- Asegurar que el timestamp se registra en cada captura guardada.
 Vista combinada de las cámaras del QCar capturando el entorno del laboratorio en 360 grados.
Vista combinada de las cámaras del QCar capturando el entorno del laboratorio en 360 grados.
B) LiDAR
- Capturar el array de datos crudos por iteración del escáner.
- Filtrar lecturas inválidas (
0,inf,nan) antes de mapear. - Generar vista 2D instantánea (proyección XY).
- Guardar scan junto con el timestamp unificado del logger.
Visualización 2D de la nube de puntos del LiDAR detectando la geometría del espacio.
C) IMU y Encoders
- Leer aceleración, giroscopio y contadores de rueda en la misma base temporal.
- Ejecutar sanity checks (ej. magnitud de aceleración en reposo ~9.81 m/s²).
- Calcular variación de ticks y
delta_tpara estimar velocidad.
6.3 Exportación / logging
Estructura sugerida
```text /data/punto-1/YYYY-MM-DD_run01/ ├── cameras_360/ ├── lidar/ ├── imu/ └── encoders/