Punto 1 — Exploración del entorno y sensores (Virtual)
1) Resumen ejecutivo
En este Punto 1 se realizó la instrumentación y validación integral del stack sensorial del QCar2 virtual dentro del ecosistema MATLAB/Simulink + QUARC (Monitor & Tune / External Mode) + QLabs. El objetivo fue confirmar que la cadena de datos de sensores funciona de extremo a extremo y que la información es coherente (unidades, magnitudes y estabilidad temporal) para soportar fases posteriores de control y navegación autónoma.
Se validaron los siguientes componentes:
- LiDAR (distancias, ángulos y bandera de nueva lectura).
- IMU/gyro y cinemática (velocidad y giro).
- Estimación de pose (estado
[x, y, heading]). - Telemetría eléctrica (voltaje, corriente, nivel y potencia).
- Se intentó integrar cámara Depth/RGB (Video3D), documentando la limitación observada en External Mode.
Como resultado tangible, este avance entrega: (i) una secuencia reproducible de arranque del entorno, (ii) instrumentación por sensor con evidencias, (iii) una MATLAB Function robusta para LiDAR con señales de tamaño variable y (iv) criterios mínimos de validación para que el equipo replique las pruebas sin depender de “memoria informal”.
2) Contexto y objetivo
El contexto de la CPS-IoT 2026 exige resolver conducción tipo taxi autónomo en Quanser City manteniendo el stack en MATLAB/Simulink. Por ello, este Punto 1 no busca “ganar” el reto final, sino establecer una base técnica sólida: verificar sensores, formato de datos, sincronización temporal, coherencia de unidades y sanity checks.
Nota crítica de ejecución: el modelo incluye bloques tipo HIL Initialize, por lo que Run normal no es compatible para la ejecución completa. La validación se realizó en QUARC → Monitor & Tune (External Mode).
3) Alcance y entregables
Alcance
- Configurar el entorno virtual y ubicar el QCar de forma controlada.
- Establecer el pipeline de ejecución en tiempo real (External Mode).
- Validar LiDAR, IMU/cinemática, pose estimada y telemetría eléctrica.
- Identificar y documentar limitaciones de cámara (Depth/RGB) en External Mode.
- Dejar evidencia visual (capturas de QLabs y Scopes) por sensor crítico.
Entregables del Punto 1
- Secuencia reproducible de arranque (scripts + orden de ejecución).
- Instrumentación por sensor (Scopes y funciones MATLAB).
- Capturas de QLabs (entorno + posición del QCar).
- Capturas de Simulink (bloques de sensores, MATLAB Function, Scopes).
- Lista de incidencias y decisión técnica (cámara).
- MATLAB Function del LiDAR utilizada para obtener
dminyangMin.
Definition of Done (DoD)
Se considera completado el Punto 1 cuando:
- Se demuestra recepción estable del LiDAR (flag
lidarNewReadingactivo). - Se obtiene
dminyangMinsin errores por señales de tamaño variable. - Se validan señales cinemáticas (velocidad/gyro) coherentes.
- Se observa pose estimada (
currentPose) en tiempo real. - Se monitorea telemetría eléctrica en un Scope 2×2 con rangos definidos.
4) Setup Virtual (QLabs + QUARC)
Checklist de prerequisitos
- MATLAB/Simulink con QUARC instalado y funcional.
- QLabs operativo (sesión iniciada y sin actores “zombies” de corridas previas).
- Proyecto Quanser correcto (rutas, modelos y scripts accesibles).
- Preparación para ejecutar el modelo en Monitor & Tune (External Mode).
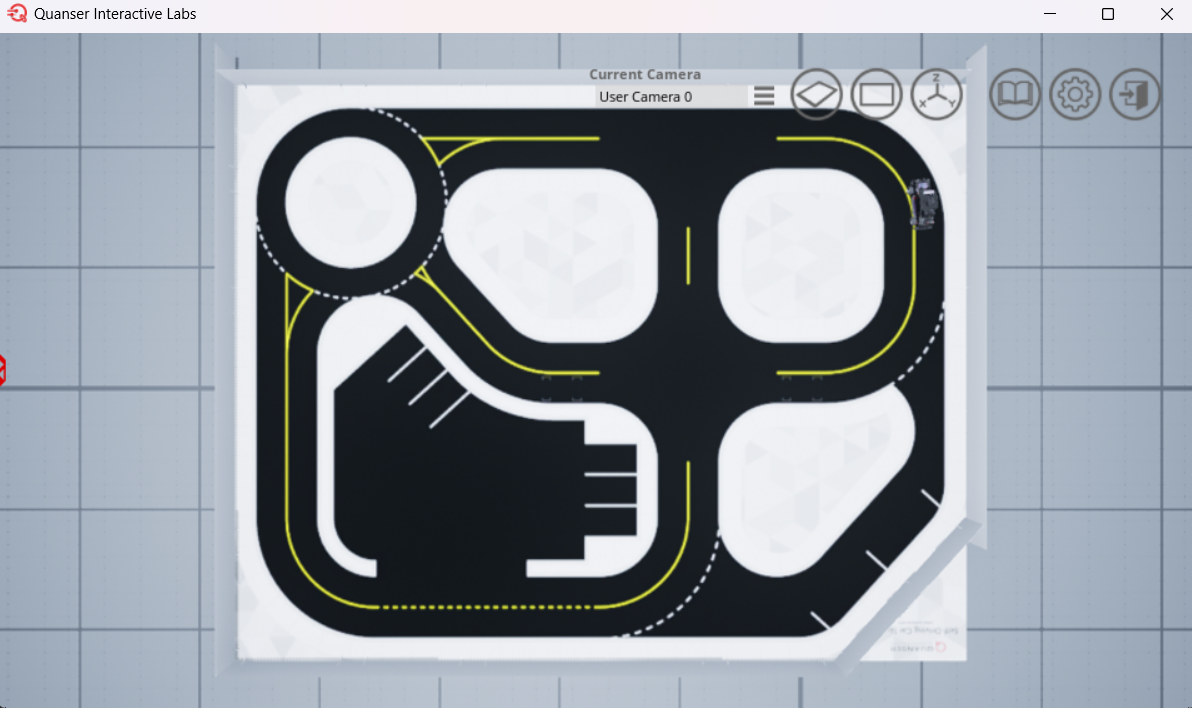 Vista del entorno virtual con el mapa cargado y el QCar visible.
Vista del entorno virtual con el mapa cargado y el QCar visible.
5) Arranque correcto del entorno (QLabs + mapa + QCar)
El primer paso fue preparar QLabs y el mapa de competencia mediante setup_competition_map.m. Este script se encarga de abrir conexión con QLabs, limpiar actores previos, spawnear el mapa y finalmente spawnear el QCar2. Adicionalmente, inicializa el RT model necesario para que el stack corra con QUARC.
La lógica de arranque se aplicó en dos fases:
- Fase de calibración:
spawn_location = 1→ ejecutarsetup_competition_map.m→ QCar en zona de calibración. - Fase de navegación:
spawn_location = 2→ ejecutar nuevamentesetup_competition_map.m→ QCar en taxi hub.
Este orden es importante: si el QCar no se spawnea en la ubicación correcta o el RT model no está activo, Simulink puede abrir, pero los sensores no entregan datos utilizables.
6) Calibración previa y verificación base
Con spawn_location = 1, se ejecutó el modelo virtual_calibrate.slx como corrida corta de validación. Esta etapa sirve para confirmar que el sistema está alineado (en especial el LiDAR respecto a los frames del mapa) y que el vehículo está activo.
 Ejecución del modelo de calibración previo (
Ejecución del modelo de calibración previo (virtual_calibrate.slx) para verificar alineación y adquisición base.
Una vez verificada la calibración, se cambió el spawn a taxi hub para operar el stack en el escenario de reto.
7) Carga de parámetros globales (setup_QCar_params)
Antes de instrumentar sensores dentro del stack, se ejecutó setup_QCar_params (o equivalente Setup_QCar2_Params.m). Este paso define tiempos de muestreo, tamaño del scan del LiDAR (SPR_qcar2), offsets/rotaciones de calibración, parámetros de control PD, parámetros de KF/EKF, y carga de calibraciones (.mat) necesarias para la instrumentación.
8) Ejecución del modelo principal (virtual_self_driving_stack_v2)
Con QLabs corriendo, el QCar spawneado correctamente y parámetros globales cargados, se ejecutó el modelo principal virtual_self_driving_stack_v2.
Modo obligatorio: ejecutar en QUARC → Monitor & Tune (External Mode). En “Run normal” se bloquea la ejecución completa por la presencia de bloques HIL Initialize.
9) Instrumentación del LiDAR (medición estable y sin errores)
El LiDAR fue el sensor más crítico y el que más restricciones impone por el manejo de señales variable-size.
9.1 Señales instrumentadas
lidarDistances [var] (m)lidarHeadings [var] (rad)lidarNewReading [1] (bool)- (Salida procesada)
dmin,angMin
9.2 Validación de nueva lectura
lidarNewReadingse conectó a un Scope (stairs) para confirmar adquisición en tiempo real.
9.3 Problema principal (variable-size)
lidarDistancesylidarHeadingssalen como señales de tamaño variable ([var]).- Bloques estándar (p. ej. MinMax, Saturation) pueden fallar con errores tipo “fixed-size expected”.
9.4 Solución aplicada (MATLAB Function robusta)
Se procesó el scan mediante una MATLAB Function compatible con variable-size, filtrando inválidos (NaN/Inf y rangos fuera de operación) y calculando:
dmin: distancia mínima válidaangMin: ángulo asociado al mínimo
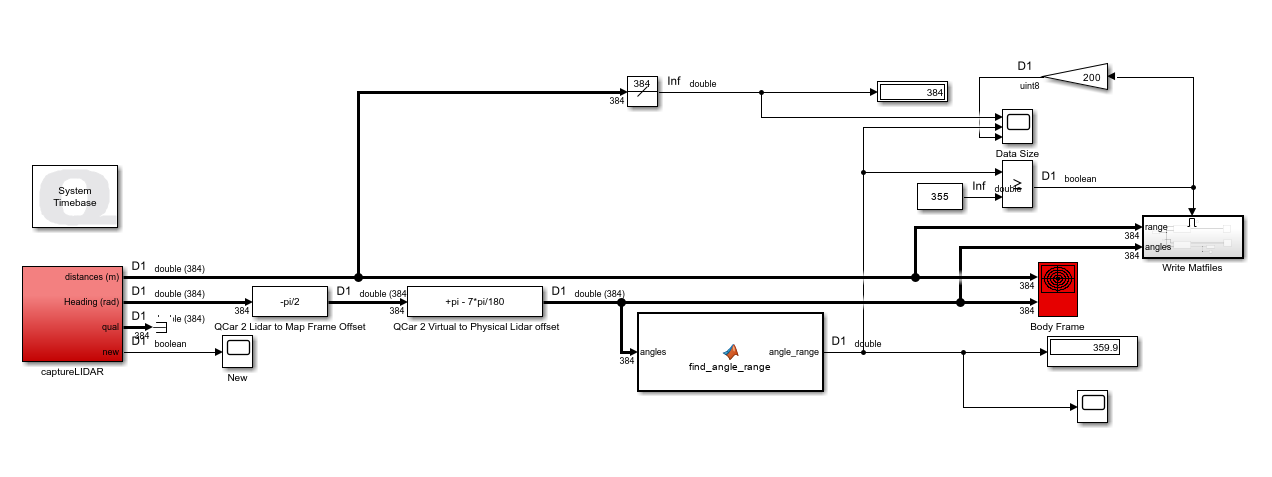
 Bloque de captura/procesamiento de LiDAR y ajustes de offsets/frames.
Bloque de captura/procesamiento de LiDAR y ajustes de offsets/frames.
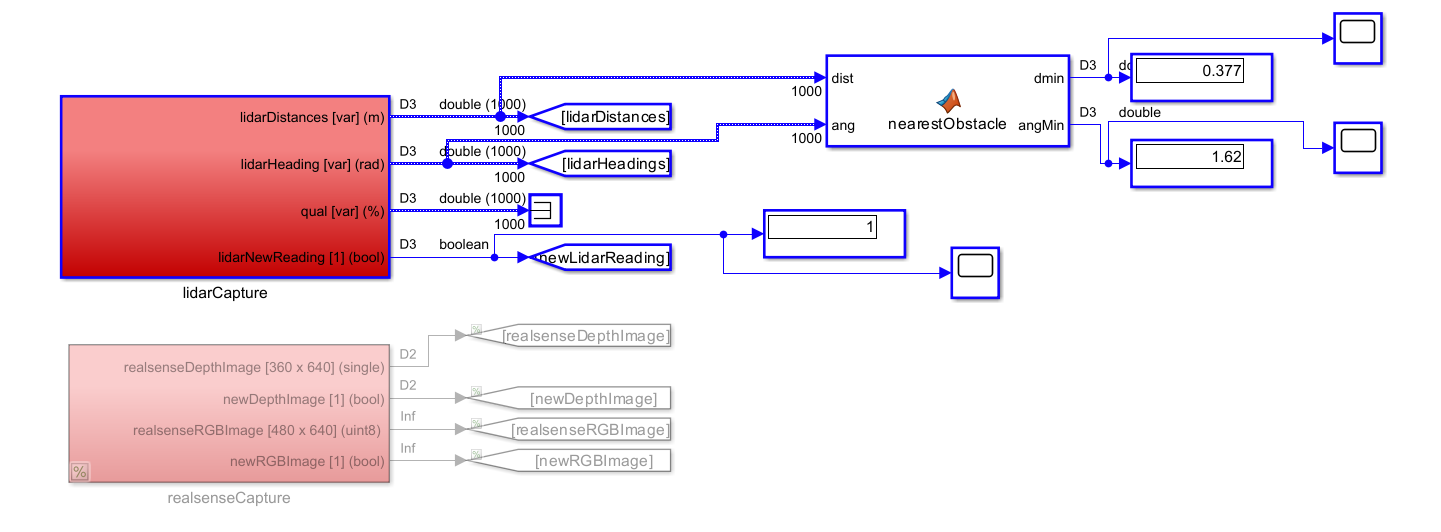
 Instrumentación de
Instrumentación de lidarDistances, lidarHeadings, newLidarReading y salida dmin/angMin.
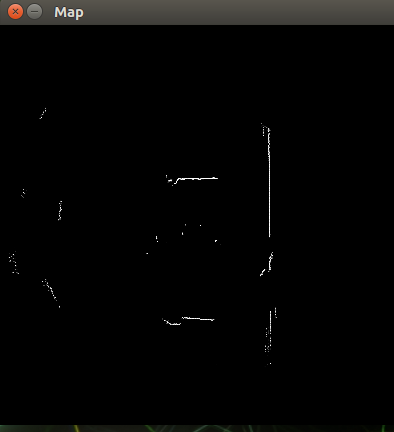 Visualización 2D de la nube de puntos del LiDAR detectando la geometría del espacio.
Visualización 2D de la nube de puntos del LiDAR detectando la geometría del espacio.
10) IMU y cinemática (odometría)
Una vez estable el LiDAR, se instrumentaron señales cinemáticas:
measuredSpeed(m/s)gyro(rad/s)- (opcional) acelerómetro (m/s²) si está disponible en el modelo
Se validó coherencia física:
- si el vehículo acelera →
measuredSpeedsube - si el vehículo gira →
gyrocambia - no hay discontinuidades raras
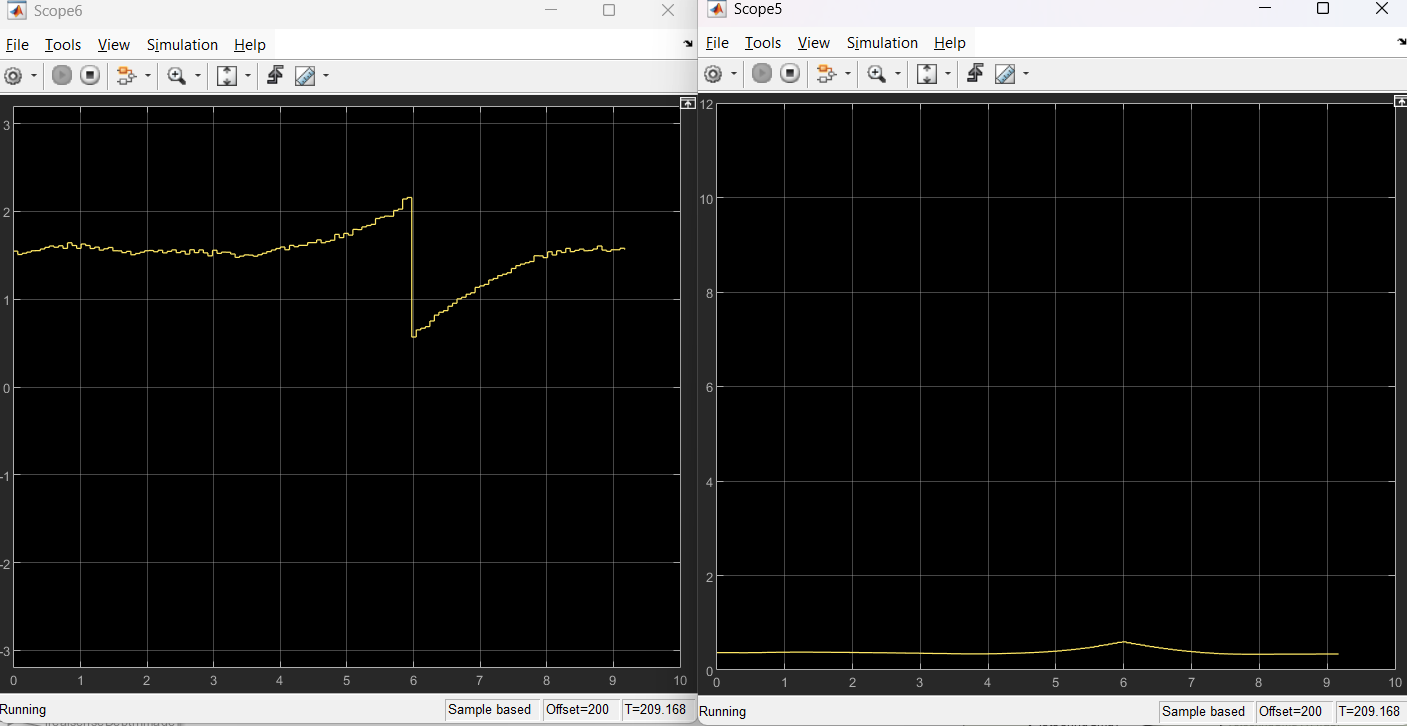
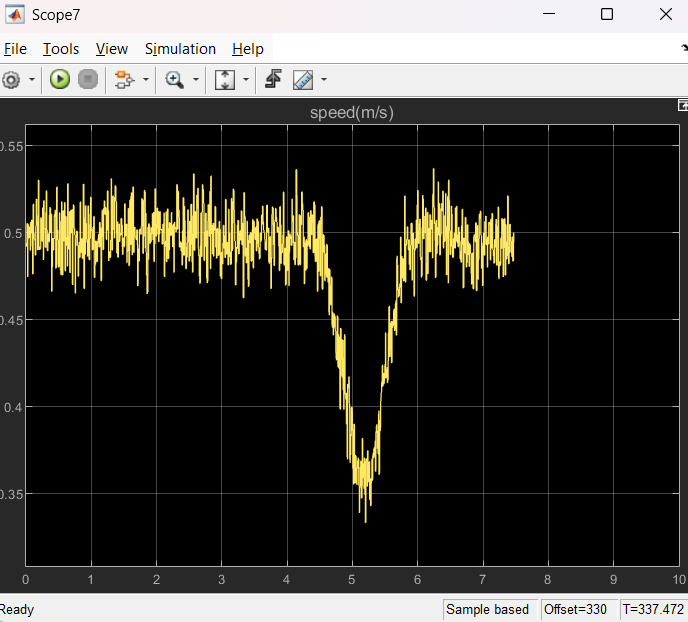 Scope de velocidad (
Scope de velocidad (measuredSpeed) mostrando variación coherente durante la corrida.
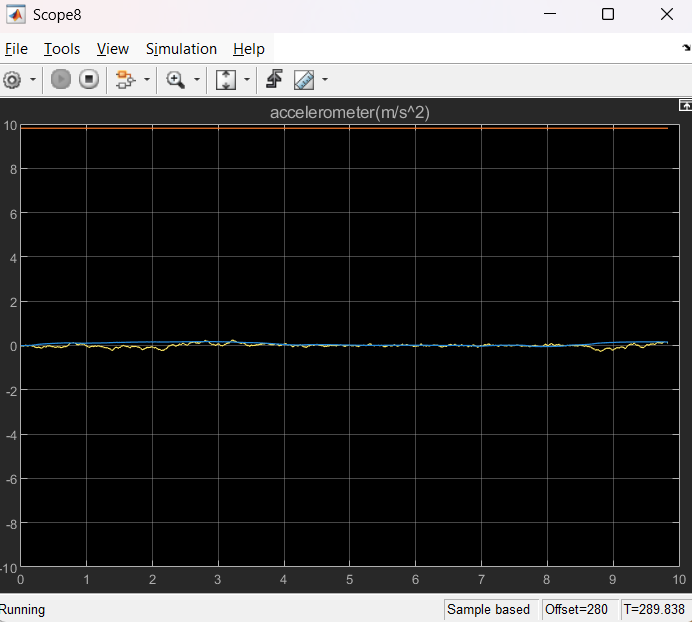 Scope del acelerómetro/IMU para ver estabilidad y coherencia de magnitudes.
Scope del acelerómetro/IMU para ver estabilidad y coherencia de magnitudes.
11) Pose estimada (currentPose)
Se instrumentó el estado [x, y, heading] calculado por el stack, usando lidarPose y currentPose. Para visualizarlo se usó Scope con “Elements as channels” o Demux(3).
Sanity checks:
xeycambian suave conforme el vehículo se mueveheadingcambia cuando gira
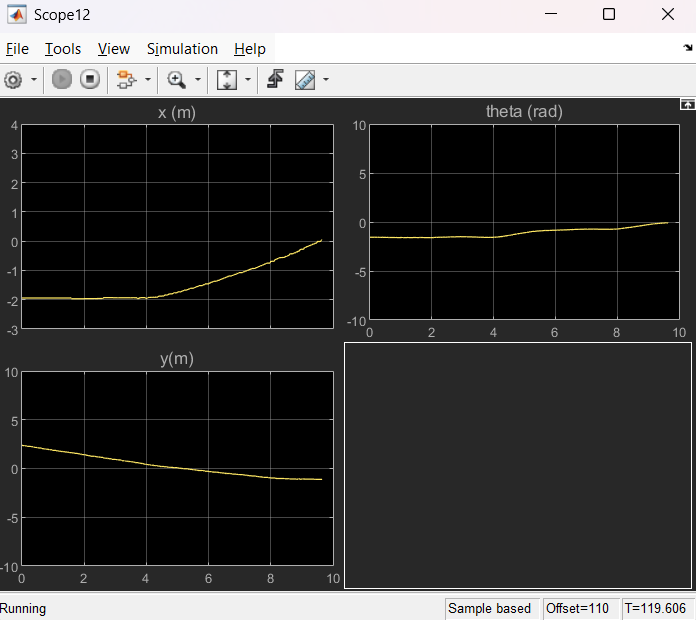 Visualización de
Visualización de currentPose: evolución de x, y y theta en tiempo real.
12) Telemetría eléctrica (voltaje, corriente, nivel, potencia)
Finalmente se instrumentaron señales internas del QCar:
batteryVoltage(V)motorCurrent(A)batteryLevel(%)motorPower(W)
Se organizó la visualización en un Scope 2×2 y se asignaron rangos manuales para que fuera legible. Se verificó que corriente/potencia suban al acelerar y que los valores sean plausibles.
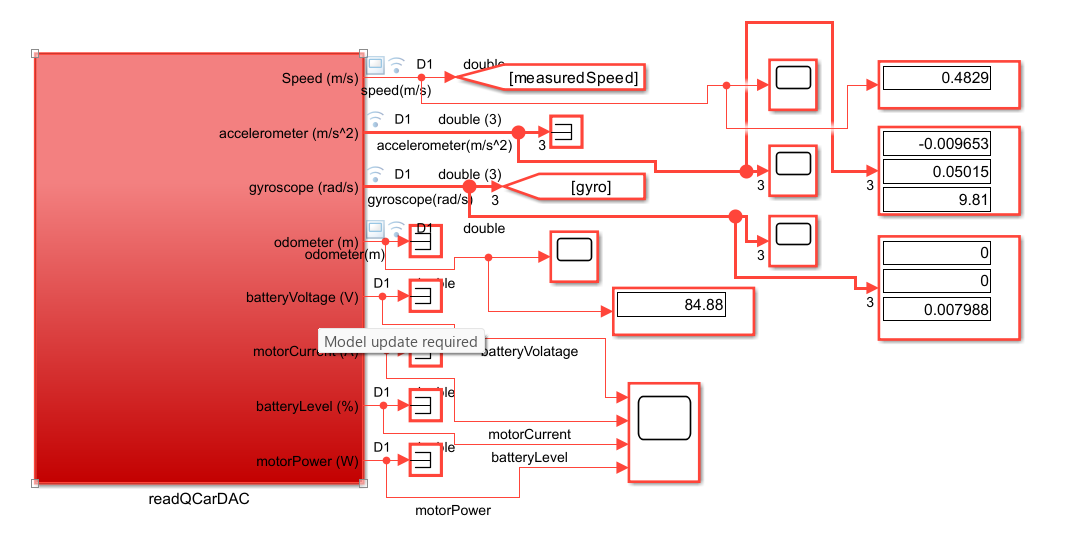 Bloque de lectura/instrumentación de telemetría eléctrica y señales internas.
Bloque de lectura/instrumentación de telemetría eléctrica y señales internas.
13) Evidencia de mapa / trayectoria (visualización 2D)
Como evidencia adicional de consistencia global (pose + entorno), se generó una visualización 2D en MATLAB donde se aprecia el trazo del vehículo respecto al mapa.
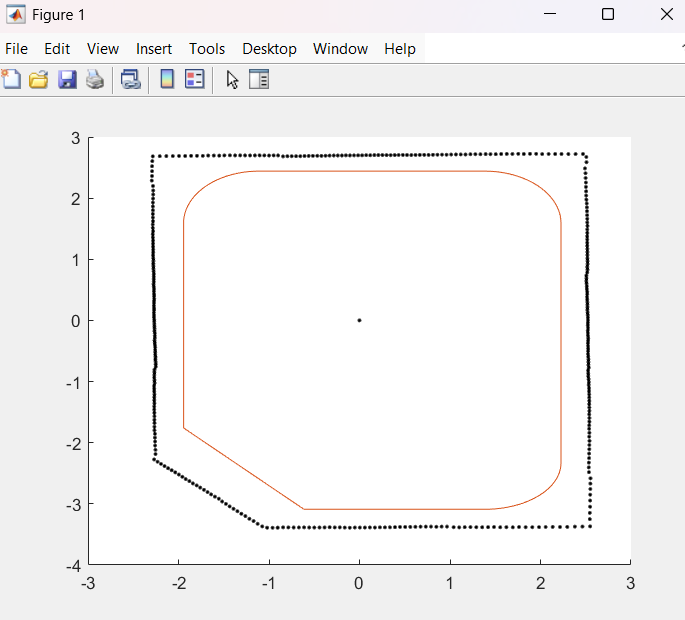 Figura 2D de trayectoria / referencia del entorno para validar consistencia espacial.
Figura 2D de trayectoria / referencia del entorno para validar consistencia espacial.
14) Cámara (Depth/RGB) — intento y decisión técnica
Se intentó activar la cámara con Video3D. En External Mode se presentó el error:
video format is not supported
Conclusión: la configuración actual del pipeline Video3D no es compatible con External Mode (formato/resolución/FPS/stream). Para no romper ejecución se decidió:
- Posponer cámara
- Priorizar LiDAR + pose + cinemática, suficientes para avanzar con navegación
15) Resultado final
Después de este proceso, el stack sensorial quedó funcionando con:
- LiDAR midiendo y entregando
dmin/angMinsin errores por variable-size - IMU y odometría coherentes (velocidad y gyro)
- Pose estimada viva (
currentPose) - Telemetría eléctrica monitoreada
- Cámara documentada como limitación (por ahora)
Y lo más importante: se dejó un flujo reproducible para que cualquier integrante del equipo pueda levantar el entorno, ejecutar el setup, correr el stack en External Mode e instrumentar sensores sin depender de “prueba y error”.
16) Anexos
16.1 MATLAB Function utilizada para el LiDAR (nearestObstacle)
```matlab function [dmin, angMin] = nearestObstacle(dist, ang) dist = dist(:); ang = ang(:);
valid = isfinite(dist) & dist > 0.05 & dist < 12 & isfinite(ang);
if any(valid) dv = dist(valid); av = ang(valid); [dmin, k] = min(dv); angMin = av(k); else dmin = NaN; angMin = NaN; end end