Controlador de drivers (CL57T)
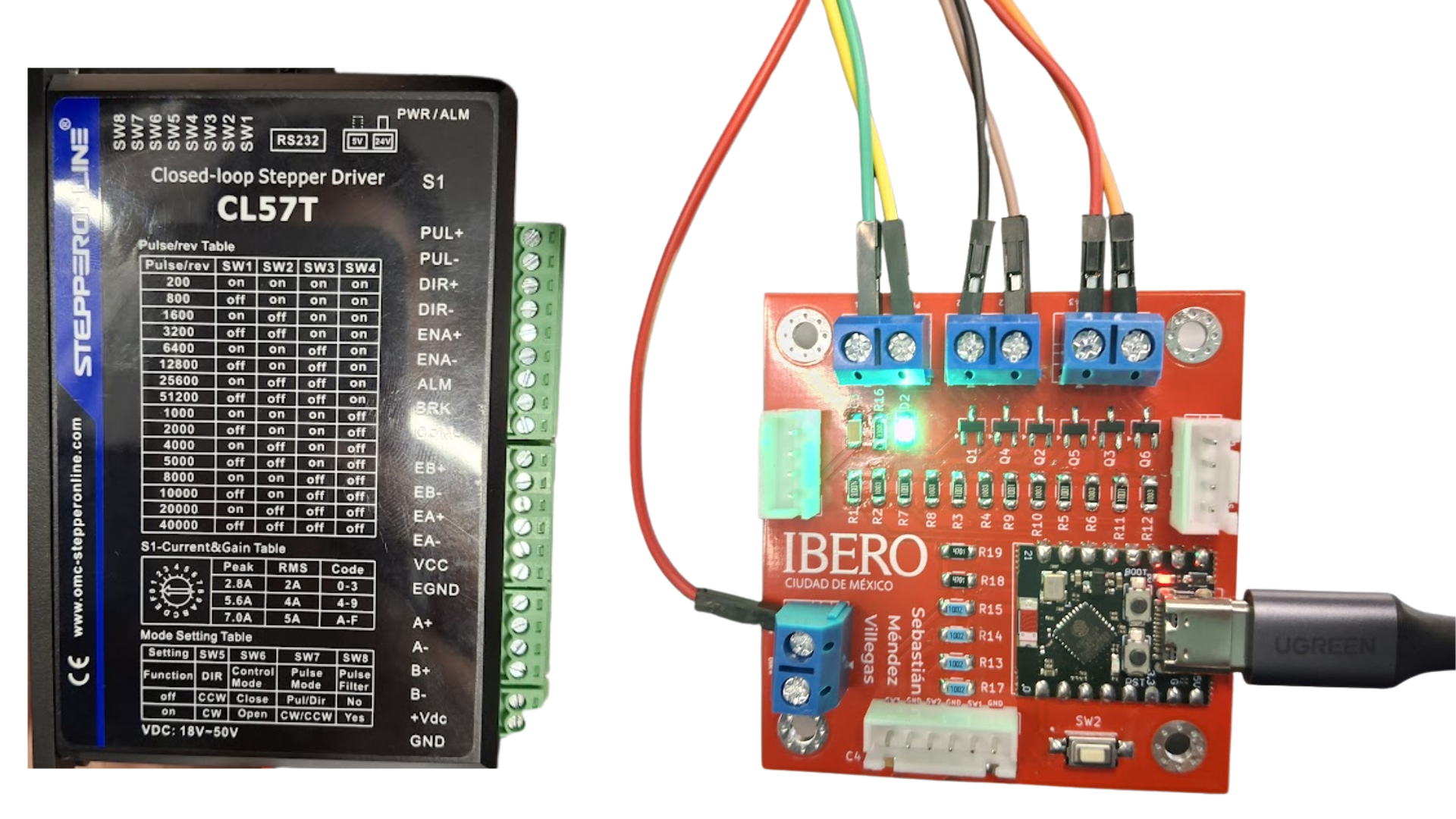
Placa de diseño propio basada en ESP32-C3 que genera las señales de paso para los tres drivers de motor del manipulador. Cada driver es un CL57T (cerrado-lazo, compatible con NEMA17).
Requisitos
- Controlar 3 ejes del manipulador (articulaciones + hombro) de forma independiente
- Generar señales PUL / DIR / ENABLE hacia cada driver CL57T
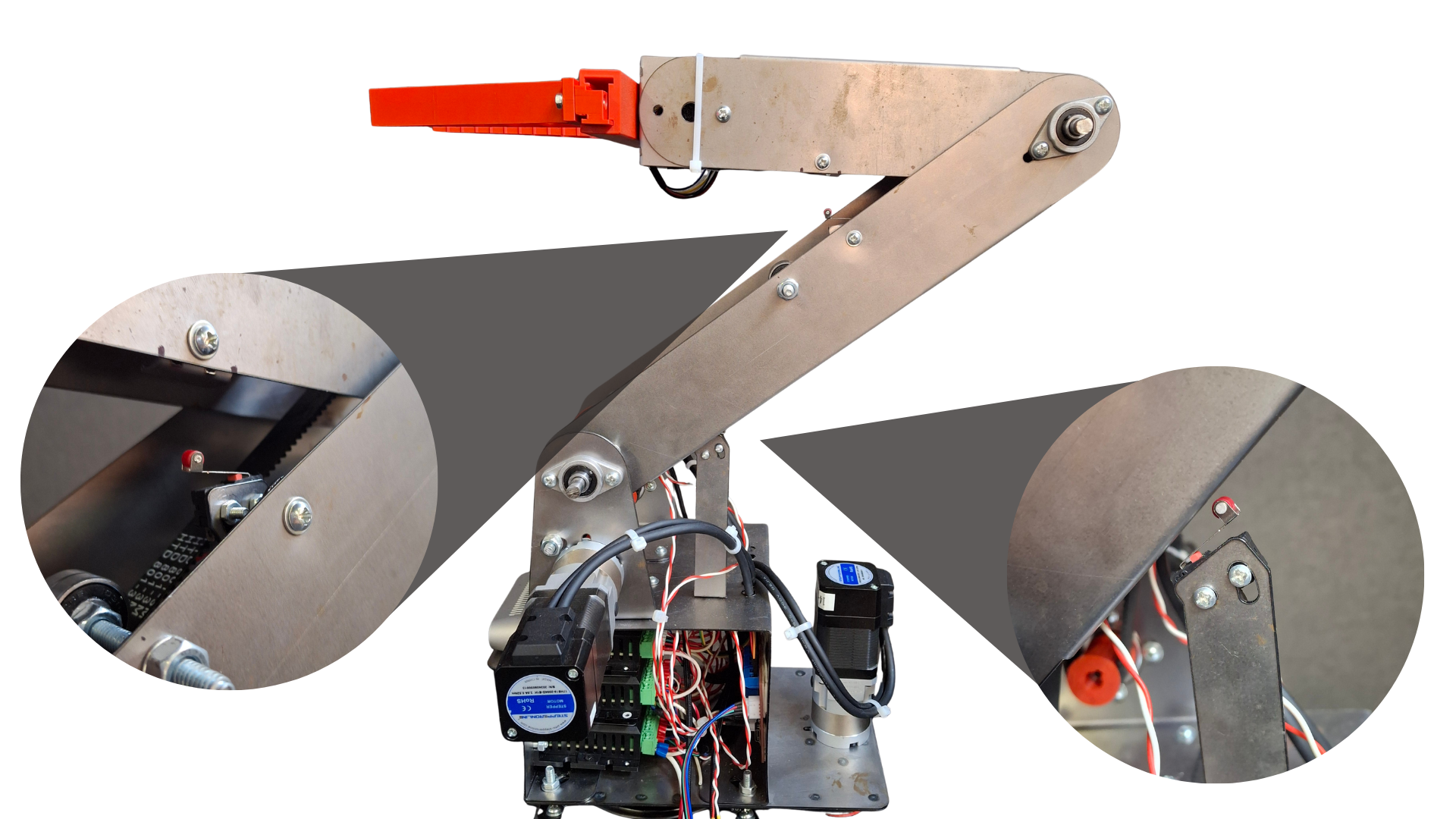
- Soportar finales de carrera para rutinas de calibración y búsqueda de cero
- Recibir comandos de posición desde la NUC vía I2C (a través del Puente H maestro)
Pendiente: Documentar la tabla de reducción total por eje y los rangos de movimiento en pasos por grado.
Diseño
Drivers CL57T
El CL57T es un driver de paso cerrado (servo-stepper) que acepta señales digitales de pulso y dirección. Opera en modo de lazo cerrado usando el encoder del motor para corregir pérdida de pasos.
| Parámetro | Valor |
|---|---|
| Motor compatible | NEMA17 |
| Tipo de lazo | Cerrado (encoder incremental) |
| Señales de control | PUL, DIR, ENABLE (lógica 5V) |
| Corriente máx. | Configurable por DIP en driver |
Placa controladora
La placa genera las señales para los tres CL57T y gestiona las entradas digitales de los finales de carrera:
| Función | Descripción |
|---|---|
| Salidas PUL/DIR/ENABLE | Una terna por cada eje (×3) |
| Entradas digitales | Finales de carrera para calibración |
| Botón físico | Rutina de búsqueda de cero activable localmente |
| Comunicación | I2C esclavo — recibe comandos del Puente H maestro |
Implementación
Los comandos de posición viajan desde la NUC por el serial del Puente H maestro (USB → COM4), y el maestro los reenvía a esta placa por el bus I2C. La placa ejecuta la interpolación de pasos localmente, sin que la NUC tenga que gestionar señales en tiempo real.
Flujo de comando de eje
Meta Quest (XR)
│ ZMQ cmd (manip_cmd)
▼
NUC (Python 3.12)
│ Serial COM4
▼
Puente H maestro (ESP32-C3)
│ I2C
▼
Controlador CL57T (ESP32-C3)
│ PUL / DIR / ENABLE
▼
Driver CL57T × 3
│
▼
NEMA17 + reductor planetario × 3 (articulaciones del manipulador)
Finales de carrera
Los finales de carrera definen los puntos de referencia (cero) de cada articulación para el proceso de homing.
Estado publicado hacia la NUC
La placa reporta estado periódicamente (MANIP_STATE) que incluye:
| Campo | Descripción |
|---|---|
busy | Indica si algún eje está en movimiento |
sw2, sw3 | Estado de los finales de carrera |
calibrated | Si se completó la rutina de búsqueda de cero |
Pendiente: Documentar el código fuente MicroPython/C de la placa, el procedimiento de flasheo y la tabla de pasos/grado por articulación.
Validación
| Prueba | Resultado |
|---|---|
| Movimiento de articulaciones (estático) | ✅ Rangos alcanzados, sin pérdida de pasos detectada |
| Rutina de búsqueda de cero | ✅ Funcional con finales de carrera |
| Control remoto desde interfaz XR | ⏳ Pendiente integración completa |
Ver evidencia en Pruebas y calibración.