Pruebas y calibración del Robot AGV
Pruebas del Puente H
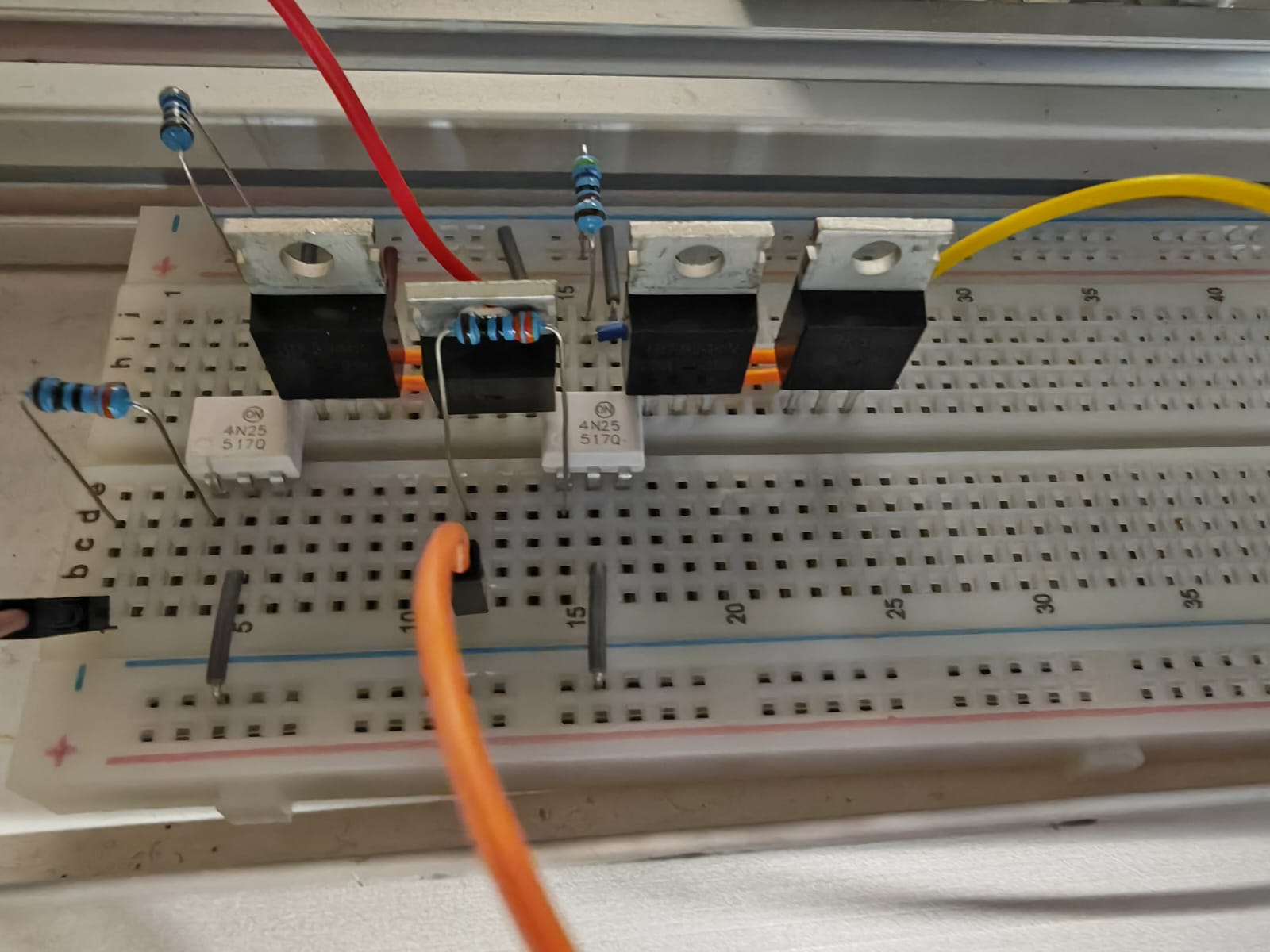
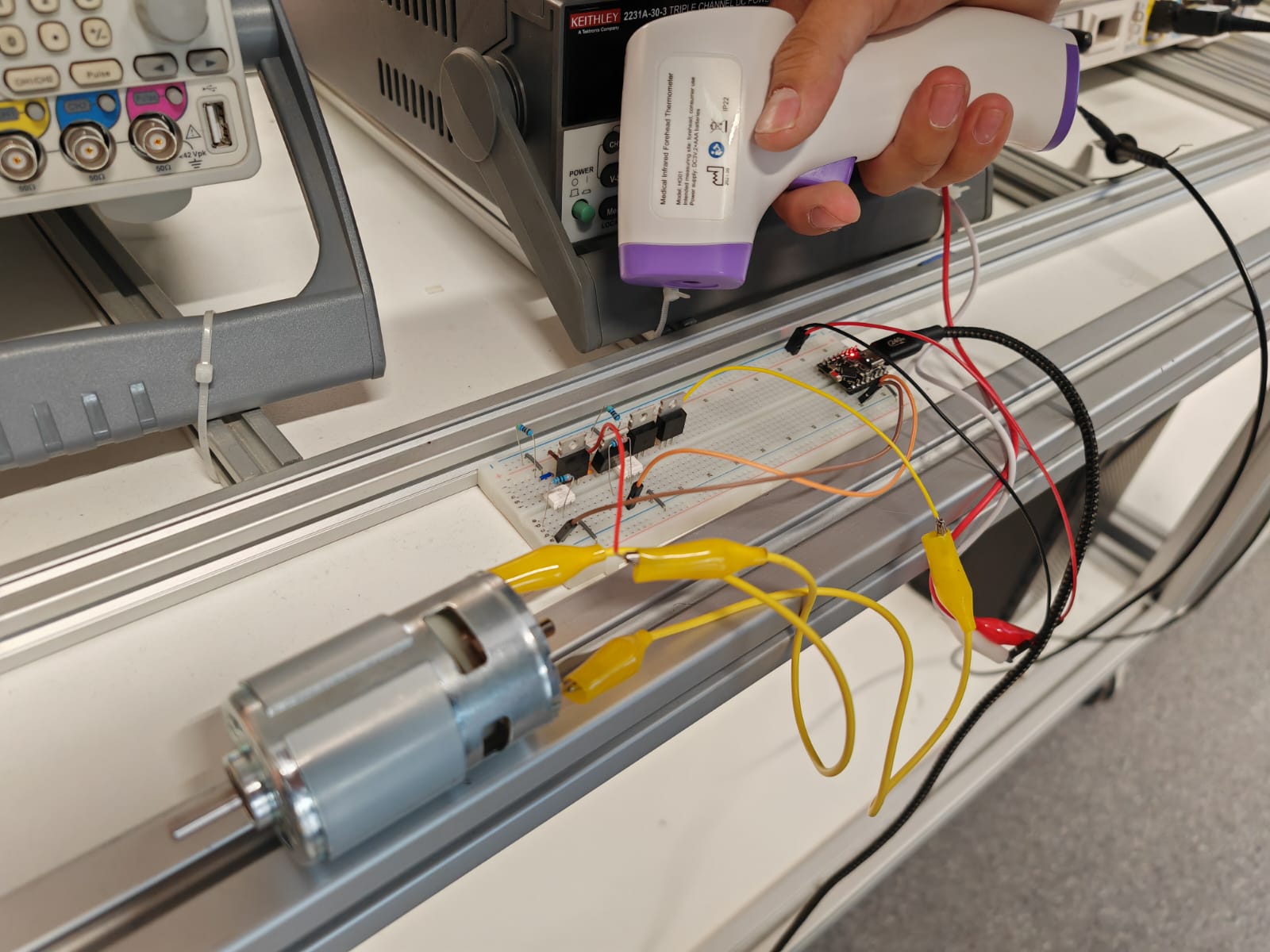
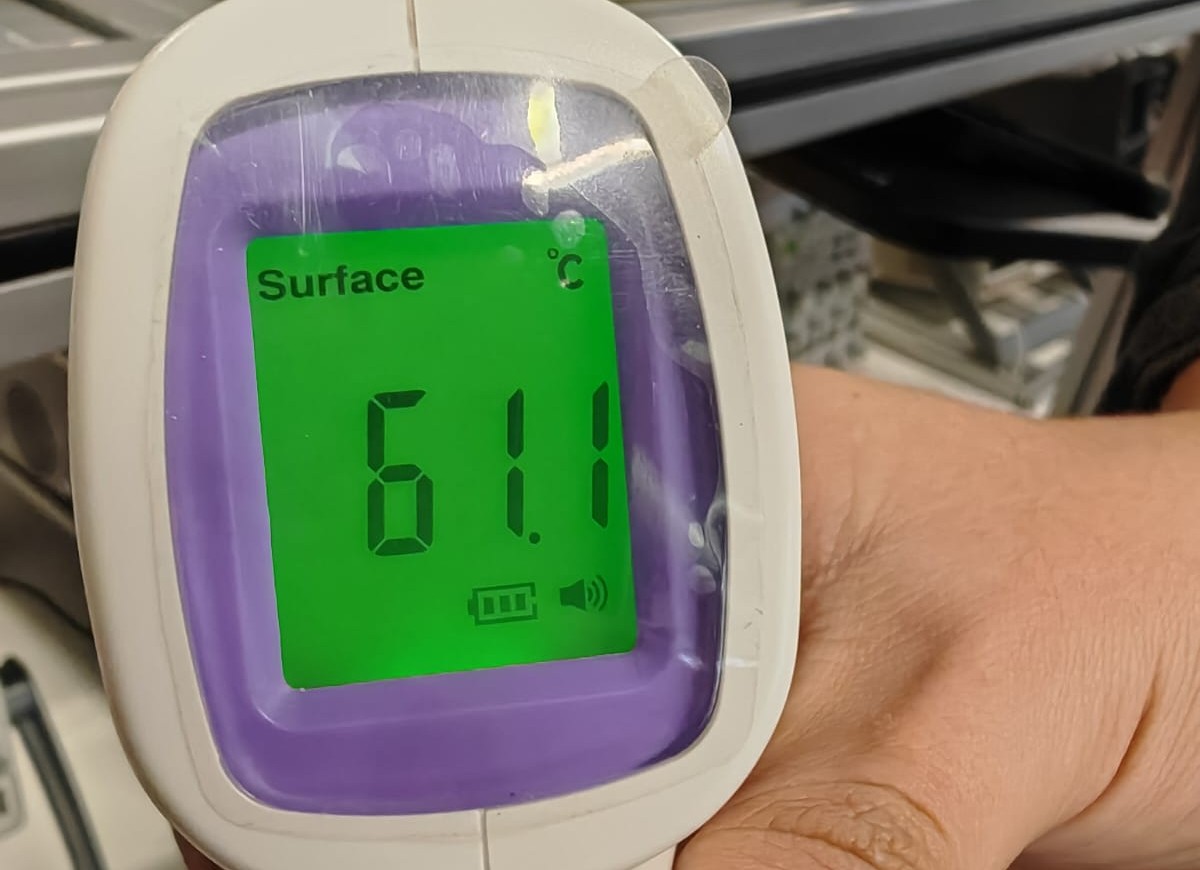
Ensamble en protoboard
El puente H se armó primero en protoboard para verificar el funcionamiento primario y la capacidad de los componentes. Los MOSFETs de la etapa de potencia se monitorearon térmicamente, registrando hasta 61 °C.
Video de pruebas PWM
Salida del puente H desde osciloscopio, probando el circuito en protoboard y la PCB final.
Pruebas del Manipulador
Prueba estática
Validación de rangos de movimiento y torque de cada articulación con el robot detenido.
Resultados:
- Articulaciones 1 y 2 alcanzan el rango de movimiento de diseño
- No se detectó juego excesivo en las transmisiones HTD3M
Prueba de movimiento rápido
Prueba preliminar de velocidad de movimiento del manipulador. Velocidades funcionales confirmadas.
Pruebas de la Plataforma Móvil
Movimiento diferencial
Validación de la plataforma móvil con los módulos Puente H de diseño propio.
Resultados:
- Movimiento diferencial estable en superficie plana
- Módulos Puente H responden correctamente a comandos de dirección
- Temperatura de MOSFETs dentro del rango aceptable al tacto
Prueba de robustez prolongada
Prueba térmica del módulo Puente H bajo carga continua durante 60 minutos.
Resultados:
- Módulo operó de forma estable durante toda la prueba
- Sin activación del fusible de protección
- Temperatura de MOSFETs estabilizada con disipadores
Pendiente: Agregar el registro temporal de temperatura durante la sesión de 60 minutos con las condiciones exactas de carga.
Resumen de resultados
| Prueba | Resultado | Observaciones |
|---|---|---|
| Movimiento manipulador (estático) | ✅ Aprobada | Rangos de movimiento correctos |
| Movimiento manipulador (rápido) | ✅ Aprobada | Velocidades funcionales |
| Plataforma móvil + PCB Puente H | ✅ Aprobada | Movimiento diferencial estable |
| Sistema integrado en piso | ✅ Aprobada | Operación conjunta validada |
| Robustez Puente H 1 hora | ✅ Aprobada | Sin fallas térmicas |
| Pick-and-place con carga | ⏳ Pendiente | Requiere integración NUC ↔ ESP32-C3 ↔ XR |
Calibración
La calibración consiste en ajustar parámetros para que el comportamiento físico del sistema sea consistente y repetible.
| Elemento | Variable | Estado |
|---|---|---|
| Motores base | Respuesta a rampas de velocidad | ⏳ Pendiente documentar |
| Manipulador | Posición home y repetibilidad por articulación | ⏳ Pendiente documentar |
| Sensores (RealSense D435i) | Alineación y corrección de profundidad | Parcial — curva interpolada implementada |
| Comunicación I²C | Tiempos de respuesta maestro–esclavo | ⏳ Pendiente documentar |
Pendiente: Documentar los procedimientos de calibración paso a paso y los criterios de aceptación por elemento.