Robot AGV
El subsistema robótico integra una plataforma móvil de tipo diferencial rehabilitada con un manipulador de 3 grados de libertad construido desde cero. Ambas estructuras usan módulos embebidos para realizar la operación de bajo nivel de la parte movil como del manipulador.
Subsecciones
Sistemas embebidos
- Puente H — driver de motor DC de diseño propio (ESP32-C3), PCB, firmware, modos I2C
- Controlador de drivers (CL57T) — placa ESP32-C3 que genera señales PUL/DIR/ENABLE para los 3 ejes del manipulador
Mecánica
- Plataforma móvil — base diferencial rehabilitada
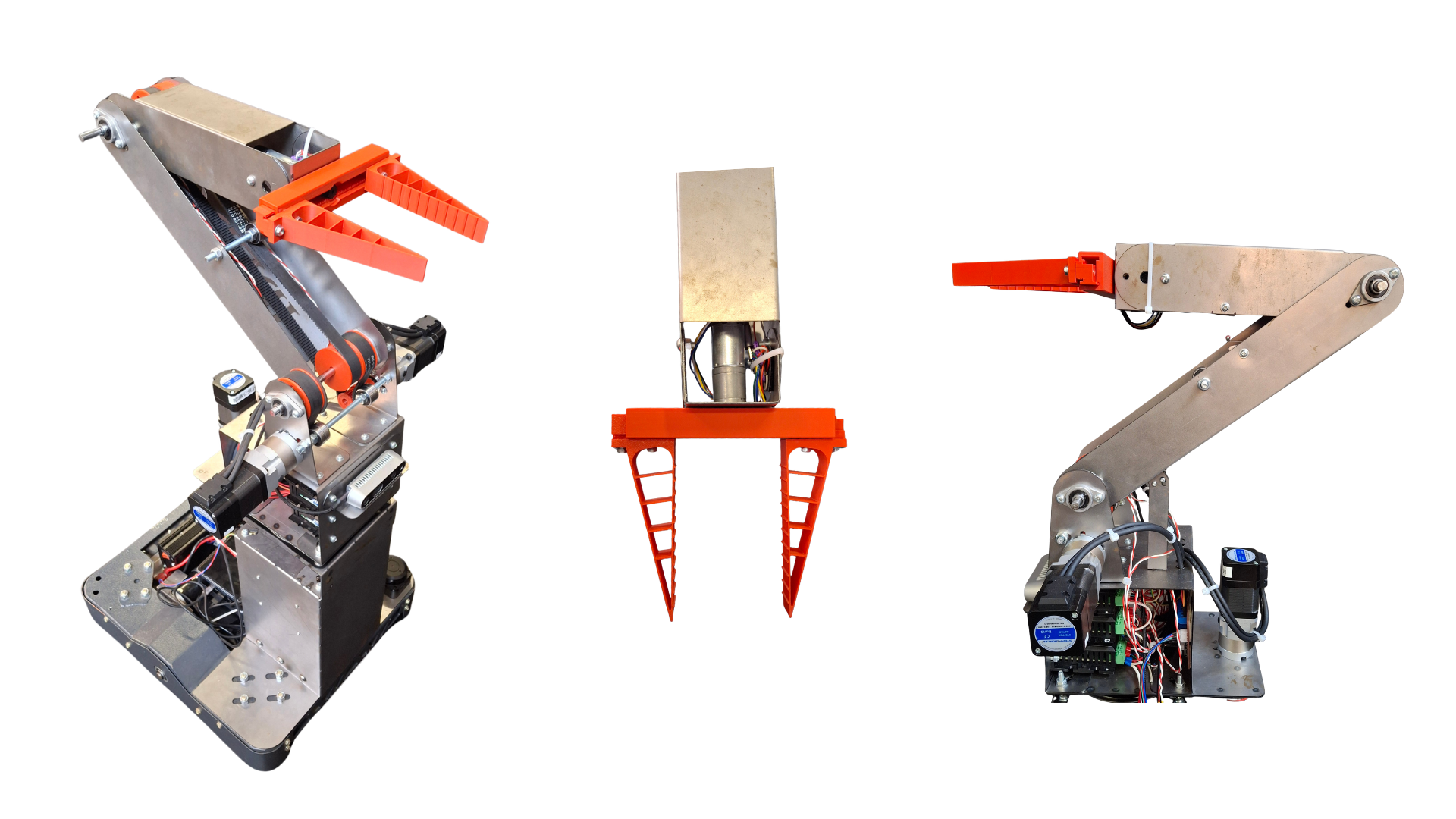
- Manipulador 3DOF — diseño, manufactura láser, CAD, ensamble
Software y validación
- Software embebido — MicroPython ESP32-C3, stack NUC Python 3.12
- Pruebas y calibración — validaciones ejecutadas, resultados
Estado del subsistema
| Componente | Estado |
|---|---|
| Plataforma móvil diferencial | ✅ Construida y probada |
| Manipulador 3DOF | ✅ Construido y probado |
| Módulos Puente H PCB (×2) | ✅ Diseñados, ensamblados y probados |
| Firmware ESP32-C3 (motores) | ✅ Funcional en todos los modos |
| Control NUC ↔ ESP32-C3 ↔ XR | ⏳ Integración en proceso |