Plataforma móvil
Requisitos
La plataforma debía soportar el peso del manipulador y la electrónica, moverse en superficies planas de almacén y ser compatible con los módulos de control embebido desarrollados para el proyecto.
Diseño
La solución adoptada es una plataforma diferencial de tipo uniciclo rehabilitada. Se conservó la estructura mecánica original y se sustituyeron los drivers de motor, cableado y electrónica de control para integrarlos con el sistema de teleoperación.
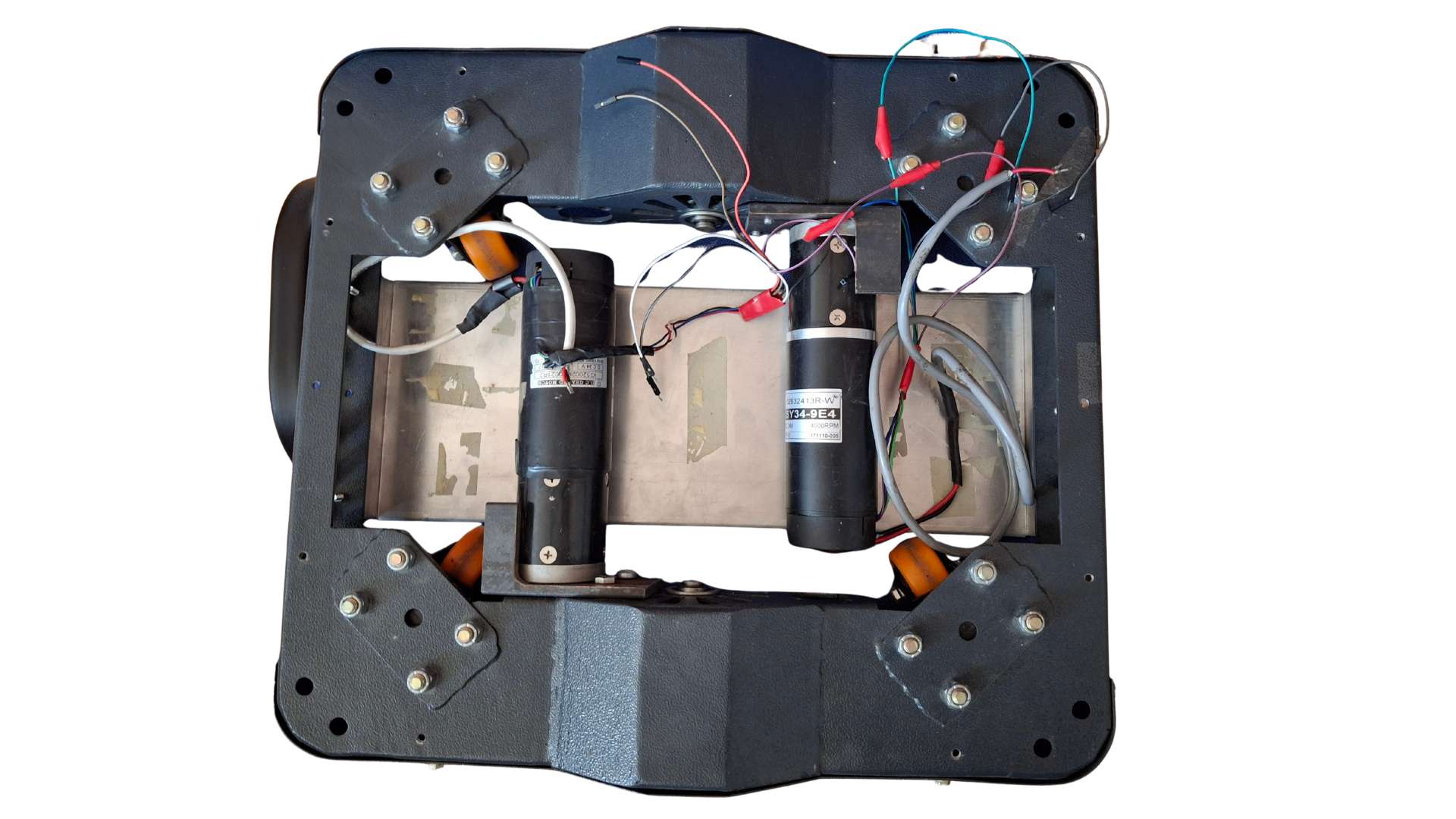
Características de diseño:
- 2 motores DC con encoders para odometría
- 4 ruedas locas (una en cada extremo) para soporte y estabilidad
- Estructura de acero calibre 18 (1.2 mm) que soporta el manipulador y la electrónica
Implementación
Drivers y configuración I²C
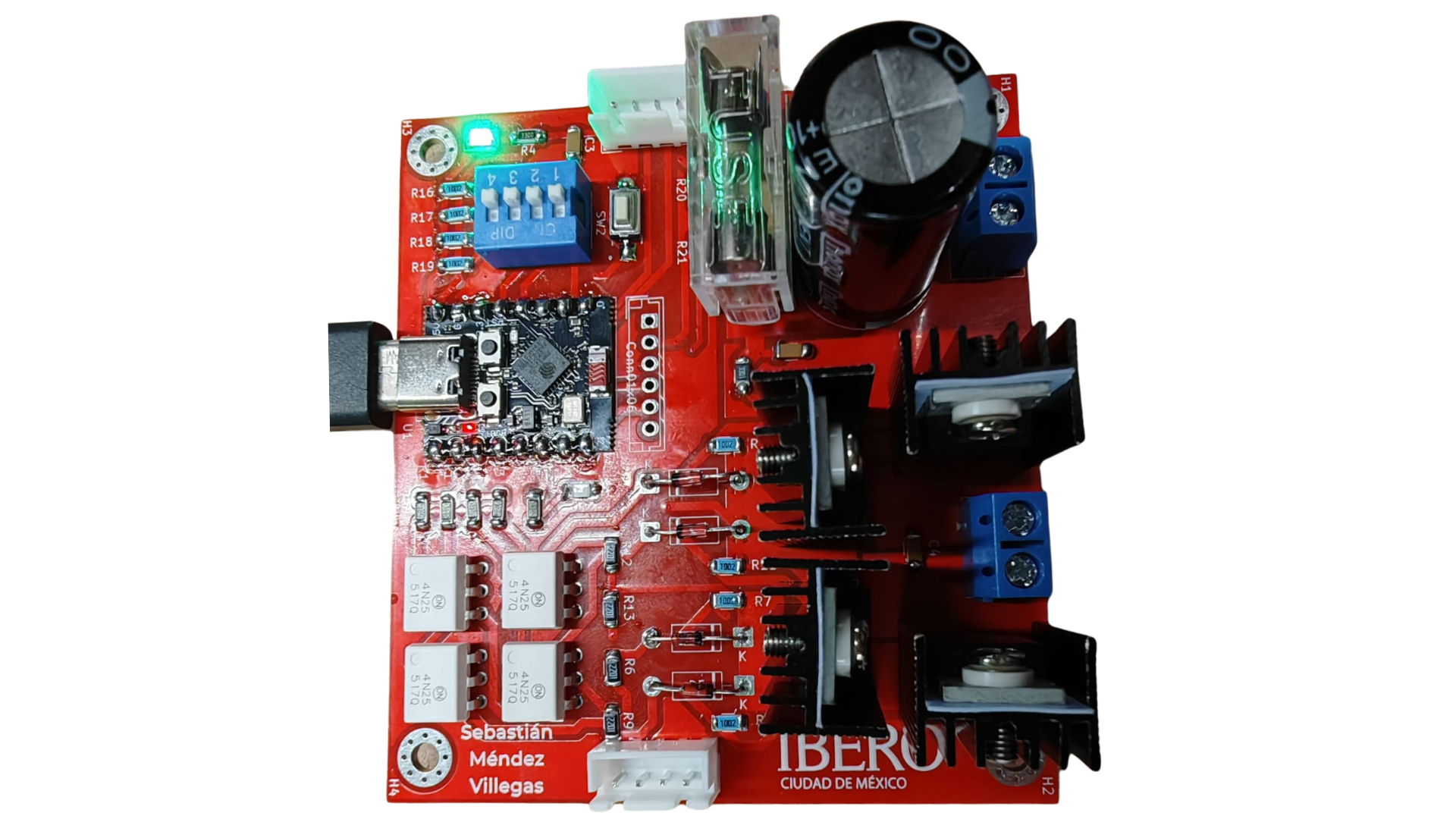
Los motores son controlados por los módulos Puente H ESP32-C3 diseñados para este proyecto (ver Electrónica — Puente H).
Se usan dos módulos en arquitectura maestro–esclavo sobre bus I²C:
| Motor | Módulo | Modo DIP switch |
|---|---|---|
| Motor derecho | Puente H #1 — Maestro | I²C Maestro (SW: 100) |
| Motor izquierdo | Puente H #2 — Esclavo | I²C Slave 1 (SW: 101) |
El módulo maestro recibe los comandos desde la NUC y controla al módulo esclavo en cadena (daisy chain I²C).
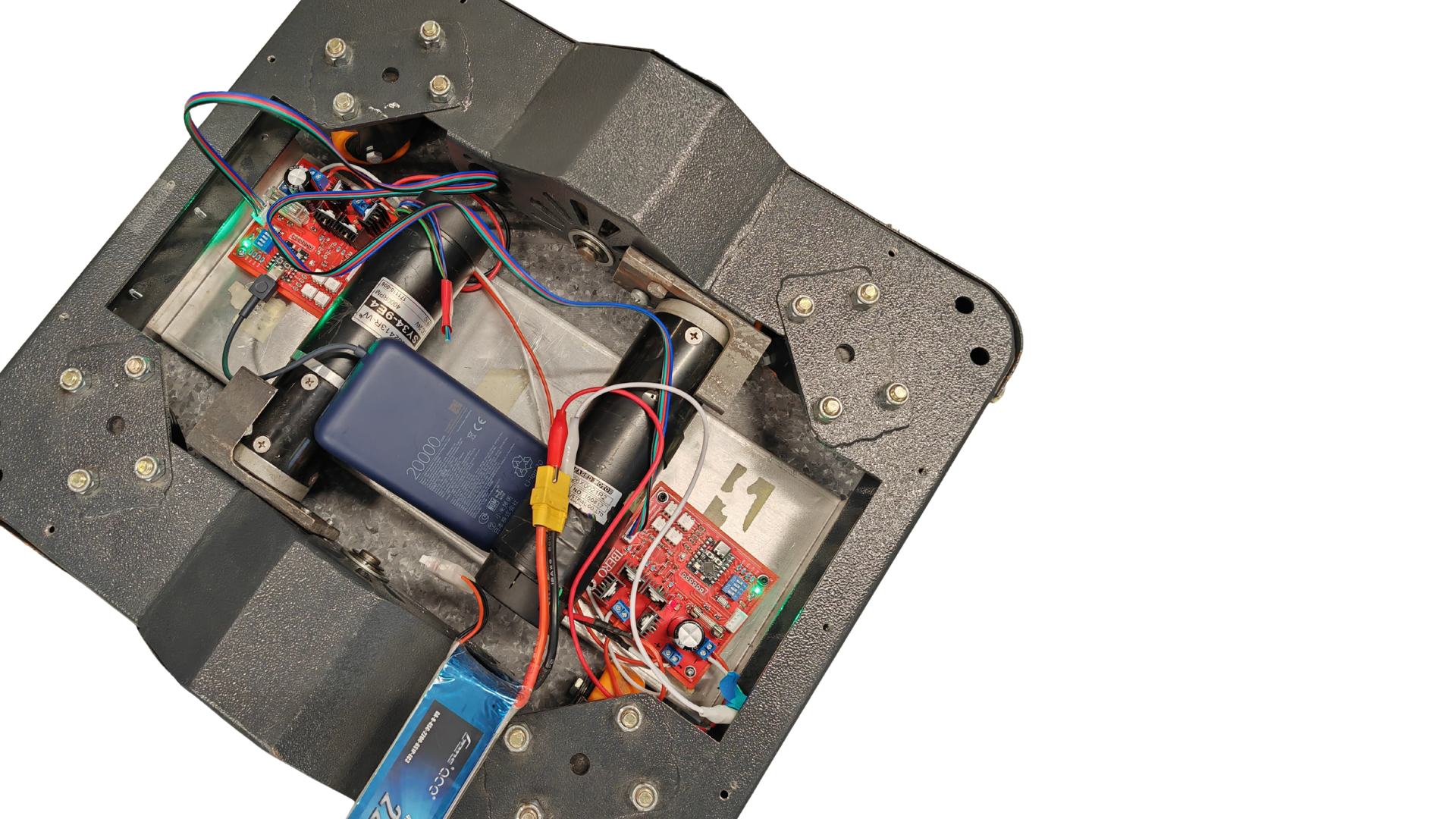
Re-habilitación
Se sustituyó el cableado y se montaron los módulos PCB de diseño propio sobre la estructura existente.
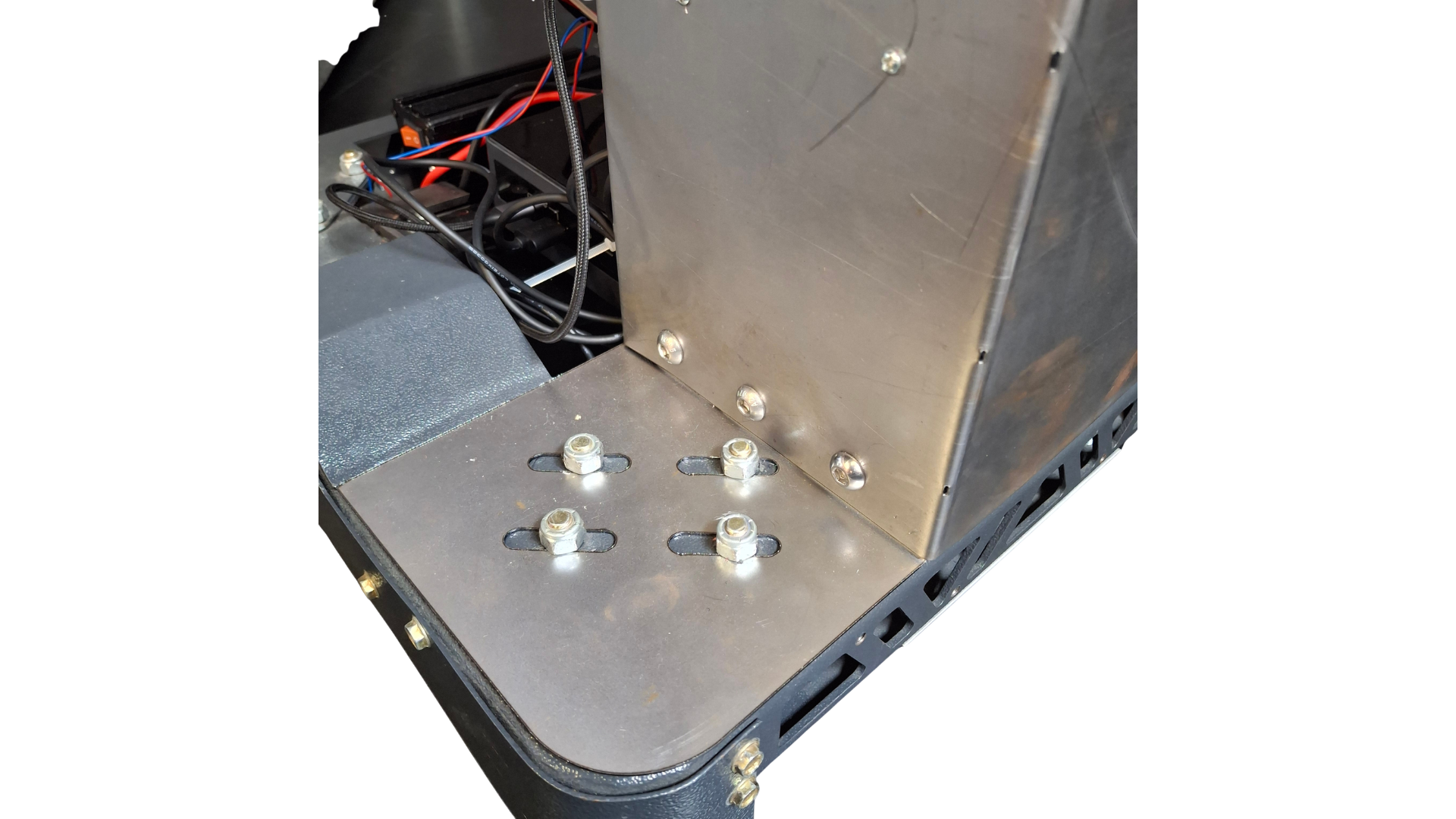
Integración estructural con el manipulador
El manipulador se monta sobre una caja metálica de elevación que se fija a la plataforma aprovechando los puntos estructurales del chasis, incluyendo zonas cercanas a los tornillos de las ruedas caster.
Validación
Resultados de pruebas de la plataforma:
| Prueba | Resultado |
|---|---|
| Movimiento diferencial en superficie plana | ✅ Estable |
| Respuesta a comandos de dirección (F/B/L/R) | ✅ Correcta |
| Temperatura MOSFETs bajo carga continua 60 min | ✅ Dentro del rango (disipadores efectivos) |
| Control remoto extremo a extremo desde XR | ✅ Completo |
Ver evidencia completa en Pruebas y calibración.